Roboty
DAUNT
Na tohtoročnom Trenčianskom robotickom dni (2010) v Trenčíne sme predstavili jeden z našich novších projektov - servisný robot DAUNT. Je to zariadenie typu teleoperátor, ovládaný človekom - operátorom cez ovládací pult. Robot sa skladá z dvoch častí: podvozku a nadstavby –manipulátora.



Podvozok je oceľovej konštrukcie, 4-kolesový, pričom každé koleso má vlastný pohon pojazdu a servomechanizmus slúžiaci na zmenu smeru jazdy. Pohon kolies zabezpečujú 4 krokové motory, uchytené na vidliciach jednotlivých kolies. S oskami kolies sú spojene pružnými spojkami typu TPS 01 (Tatran team Trenčín). Os otáčania vidlice je v osi kolesa , vidlica je schopná otočiť sa 90 stupňov do jednej strany a 90 stupňov do druhej strany. Z krokového motora sa krútiaci moment na os vidlice prenáša cez remeňový prevod T5 pri prevodovom pomere 4:1.


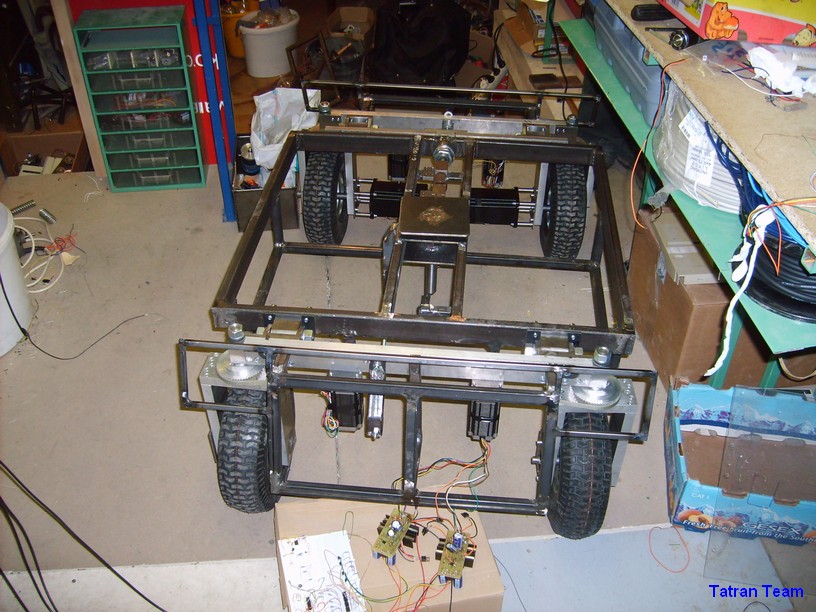
Spomínané možnosti natočenia kolies dovoľujú vozidlu neobmedzené možnosti pohybu po priestore, otáčanie sa na mieste a pod. Podvozok má vďaka takejto konfigurácii možnosť viacerých módov pohybu:
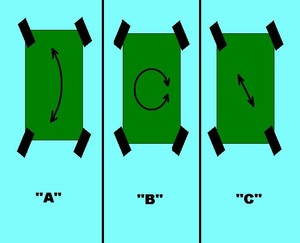
1.V tomto móde sa podvozok pohybuje ako automobil, s tým rozdielom, že sa mení uhol natočenia nielen predných, ale aj zadných kolies. Kvôli dodržaniu geometrie riadenia sa uhly natočenia kolies a rýchlosti pohonov priraďujú z tabuliek naprogramovaných v elektronike riadenia podvozku (to znamená programovo vytvorený diferenciál a geometria riadenia). Podvozok má väčšiu ovládateľnosť, menší polomer otáčania. Na obrázku môžete tento mód nájsť nad písmenom „A“.
2.Tento mód slúži na otáčanie na mieste, prípadne na zmenu smeru pohybu v úzkych priestoroch, kde to mód 1(„A“) nedovoľuje. Pri prepnutí na tento mód sa kolesá nastavia tak, aby opisovali kružnicu. Na obrázku ako „B“.
3.Mód priameho pohybu. V kombinácii s módom otáčania na mieste, je veľmi účinný spôsob ako sa pohybovať v úzkych priestoroch. Kolesá majú vždy rovnaký smer aj rýchlosť. Na obrázku nad písmenom „C“.
Zadná napráva je uložená v centrálnom čape (je kyvná), čo výrazne uľahčuje prechod nerovnosťami. Obe nápravy sú uložené na vodorovných čapoch čo umožňuje zmenu rázvoru, pričom si vozidlo dokáže „ľahnúť na brucho“. Tato funkcia výrazne zvyšuje stabilitu pri operácii manipulátora. O sklápanie naprav sa starajú dva lineárne aktuátory Hiwin (zdvižné prevodovky poháňané jednosmernými motormi). Podvozok je vybavený otočnou konzolou na upevnenie manipulátora. Otáčanie zabezpečuje jednosmerný motor. Táto os je vybavená preťažovaciou spojkou TTPS 01(Tatran team Trenčín). Ďalej je podvozok vybavený kamerou umiestnenou vpredu v nárazníku, umožňujúcou pohľad na priestor pred podvozkom počas pohybu. Podvozok taktiež obsahuje pozičné a výstražné svetlá, všetky na technológii LED kvôli spotrebe a rozmerom. Pozičné sú zapínané diaľkovo (vpredu biele, vzadu červené). Výstražné sú oranžovej farby a majú dva módy – rýchle a pomalé blikanie. Rýchlym blikaním upozorňujú na rozkladanie alebo skladanie podvozku, pomaly blikajú iba pri rozloženom podvozku (režim manipulácie).

Celá elektronická časť podvozku je riešená modulárne pre možnosť ďalšieho možného vývoja. Samostatne sú riešené nápravy, na ktorých sú drivre pre krokové motory pojazdov, svetlá a snímacie prvky servomechanizmov natáčania kolies. V tele podvozku sa nachádzajú elektronické bloky napájania a riadenia pohonov, drivre a riadenie servomechanizmov, obvody riadenia svetiel, sklápania podvozku a komunikácie s okolím.

Popis manipulátora: Manipulátor sa skladá z dvoch ramien ,priemer pracovného prostredia je 3 metre. Pohony ramien tvoria lineárne aktuátory Hiwin. Na konci ramena R2 je umiestnený koncový efektor LE – 1. V ramene R2 je otočne uložená duralová rúra, otáčaná jednosmerným motorom cez remeňový prevod typu T5. Táto os je vybavená preťažovaciou spojkou typu TTPS 01(Tatran team Trenčín). Pohon je umiestnený v zadnej časti ramena ,za osou otáčania, čím výrazne prispieva k vyváženiu ramena. Na konci tejto rúry je „zápästie“ ktoré obsahuje ďalšie dve osi. Jedna zabezpečuje sklon zápästia, druhá otáčanie koncového efektora. Pohon sklonu zápästia (Maxon motor) je taktiež umiestnený v zadnej časti ramena R2, je vybavený preťažovciou spojkou TTPS 01. Rameno je vybavene 2 kamerami. Jedna je umiestnená v zadnej časti ramena R2 a poskytuje výhľad pri polohovaní manipulátora v priestore, druhá je umiestnená tesne za efektorom a poskytuje pohľad na uchopovaný materiál v efektore. Rameno je riešené ako samostatné, to znamená, že obsahuje všetky mechanické a elektronické časti potrebné k svojej činnosti. Pre jeho použitie je teda potrebné iba pripojiť napájanie a sériovú linku pre zadávanie príkazov. Väčšina elektroniky je v ramene R1 (meniče pohonov, PWM modulátory, obvody komunikácie), zvyšná časť sa nachádza na ramene R2 (prepínač kamier, ovládanie efektora).


Ovládacie zariadenie je celé umiestnené v odolnom kufri s vlastným napájaním (výdrž cca 2 hod.).
Obsahuje ovládacie prvky, farebný LCD monitor 7“ pre zobrazovanie signálu z videokamier, dátový transciever a prijímač videosignálu z kamier.
Ovládacie prvky tvoria hlavne tri 3-osé joysticky. Dva slúžia na ovládanie jednotlivých častí manipulátora. Z tretieho sú použité dve osi na ovládanie pojazdu a smeru pohybu podvozku.
Zvyšná časť ovládacích prvkov slúži na prepínanie módov podvozku, ovládanie efektora, svetiel, prepínanie kamier a rozkladanie podvozku (tzv. „ľahnutie na brucho“).

Príspevok pridaný dňa: 05.01.2012 od užívateľa: Dodoslav.
| Zobraziť všetky
|